Dual-field-of-view lidar
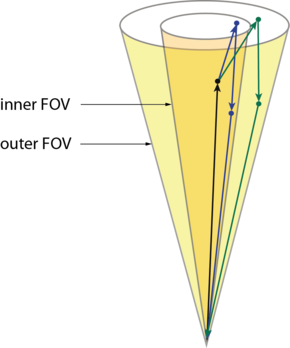
The dual-field-of-view (dual-FOV) Raman lidar technique allows the investigation of cloud microphysical properties. Profiles of the cloud extinction coefficient as well as cloud droplet effective radius are derived in the lowest 150 to 250 m of water clouds up to optical depths of 2 to 3. From these quantities profiles of the liquid water content (LWC) and cloud droplet number concentration (CDNC) are calculated. All four of these quantities are very important cloud properties, e.g. for the evaluation of the clouds’ radiative effects. Thus, the capability to obtain these cloud properties in combination with the conventional lidar methods for the retrieval of numerous aerosol properties makes the dual-FOV Raman lidar technique an ideal approach for the investigation of aerosol-cloud interactions.
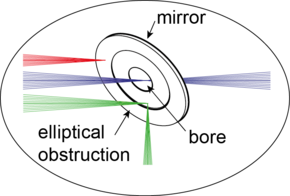
The technique relies on the measurement of multiply scattered light. At lidar probings of water clouds, a large fraction of the light which is scattered at cloud droplets is scattered in forward direction. The result are multiple scattering processes, which describe a scattering process where one or more forward scattering events occur before and/ or after a backscattering event. As the angle at the forward scattering depends bijectively on cloud droplet size, the angular distribution of the backscattered light contains information about the droplet size.
Literature
Wandinger, U. (2005), Raman lidar, in Lidar - Range-resolved optical remote sensing of the atmosphere, C. Weitkamp (Ed.), Springer, New York.
Application
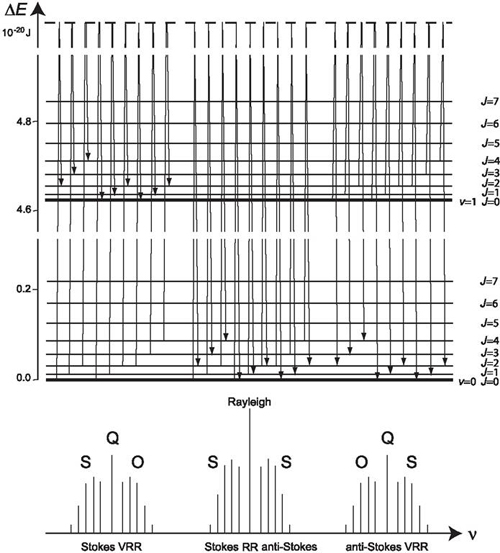
Since the population of energy levels follwos a Boltzmann distribution, the intensity distribution within the Raman bands contains information on the temperature in the scattering volume. One application of Raman lidars is therefore the measurement of atmospheric temperature profiles.
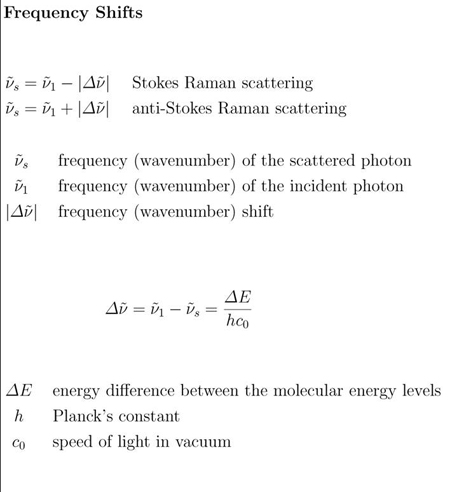
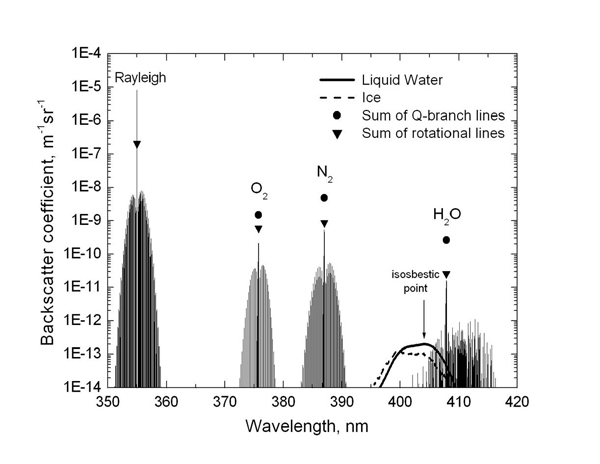
A change of the vibrational state results in frequency shifts of some hundred to thousand wavenumbers (depending on the Raman active molecules). Spectrally resolved analysis of backscattered radiation therefore allows the measurement of various atmospheric species. However, the comparably low Raman scattering cross sections limit a meaningful application to gases present in rather high concentrations. Thus Raman lidar is widely used for measurements of atmospheric water vapor.
Raman backscattering from gases of known number concentration (oxygen, nitrogen) serves as an atmospheric reference. Therefore, Raman nitrogen/oxygen signals can be used to retrieve aerosol extinction coefficients and to determine ozone concentrations using the so-called Raman DIAL technique.